FPGA Implementation
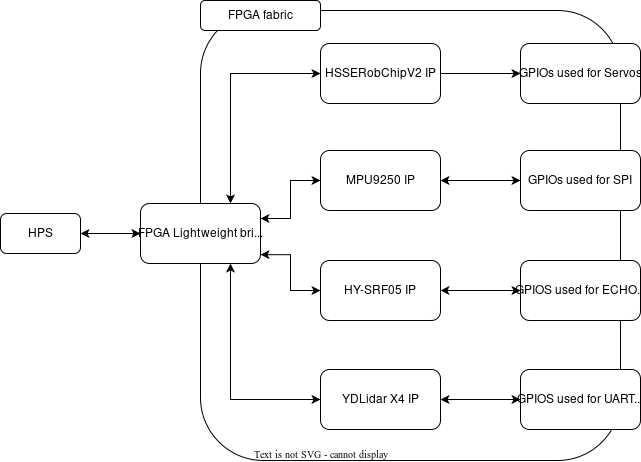
In the FPGA fabric, IP cores were used, which interact with the respective sensors and actuators. The IP core responsible for the movement of the servos and the robot itself is based on the hardware description of the hexapod developed by the HSD program. The MPU9250 sensor was used to detect rotations and to determine the current acceleration. The height to the ground is measured using a HY-SRF05 ultrasonic sensor. A YDLidar X4 sensor, which periodically scans 360 degrees in space, is available for position detection and also for measuring the speed while the robot is moving.
The HPS can communicate with these IP cores via the Lightweight FPGA Bridge.
A Cyclone V FPGA was used as the SoC. For this purpose, a DE0-Nano SoC and a DE10-Nano SoC were used in this project. Both boards have a Cyclone V chip.
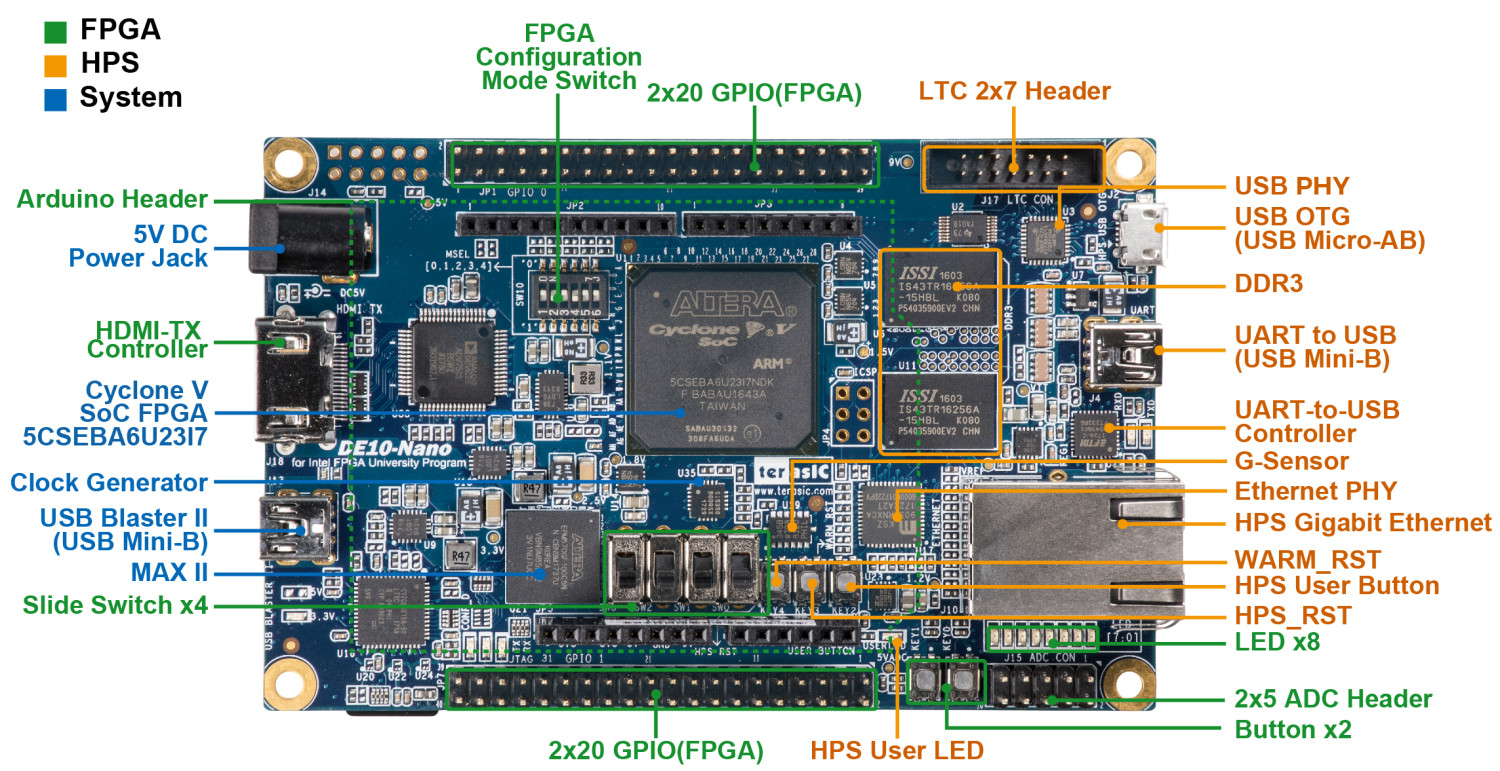
Terasic DE10-Nano
- Intel Cyclone V SE 5CSEBA6U23I7
- 800 MHz Dual-Core ARM Cortex-A9
- 1 GB DDR3 SDRAM (32-bit data bus)
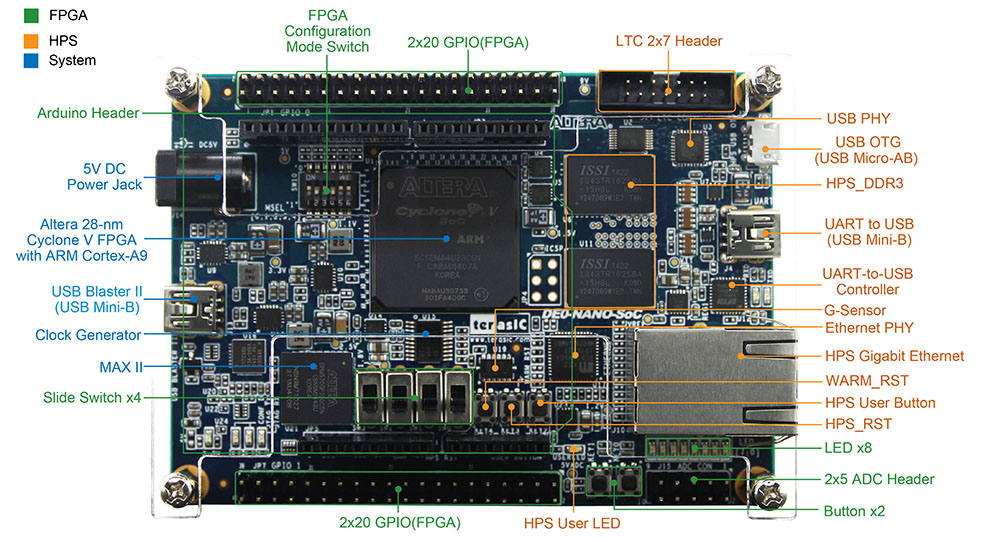
Terasic DE0-Nano
- Altera Cyclone V SE 5CSEMA4U23C6N
- 925 MHz Dual-Core ARM Cortex-A9
- 1 GB DD3 SDRAM (32-bit data bus)